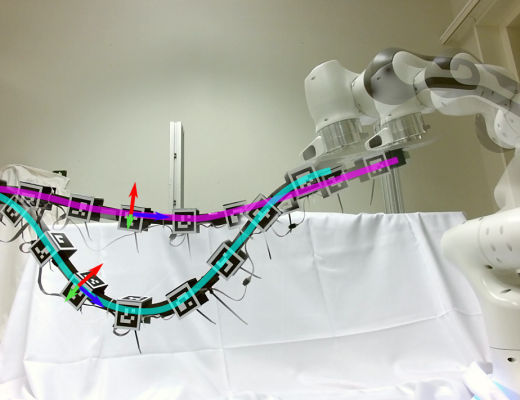
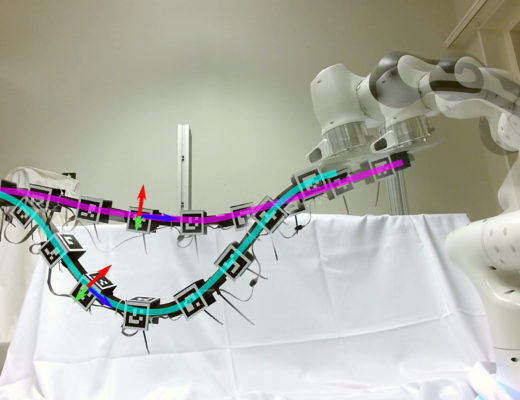
Learning differentiable dynamics models for shape control of deformable linear objects Abstract Robots manipulating deformable linear objects (DLOs)—such as surgical sutures in medical robotics, or…
Posts related to the Hose Protect project
Learning differentiable dynamics models for shape control of deformable linear objects Abstract Robots manipulating deformable linear objects (DLOs)—such as surgical sutures in medical robotics, or…
Abstract: Tracking of deformable linear objects (DLOs) is important for many robotic applications. However, achieving robust and accurate tracking is challenging due to the lack…
Learning to Propagate Interaction Effects for Modeling Deformable Linear Objects Dynamics Abstract Modeling dynamics of deformable linear objects (DLOs), such as cables, hoses, sutures, and…