Learning Object Affordances for Full-body Mobile Manipulation
This project, funded by the Wallenberg Autonomous Systems Program (WASP), aims at investigating the ways in which full-body control can be connected to perception on a mobile manipulator robot. We will investigate methods to extract parametric constraints for manipulation policies, using machine learning techniques and neural scene reconstruction. This project is connected to the WASP research arena “Robotics.” Read more here.
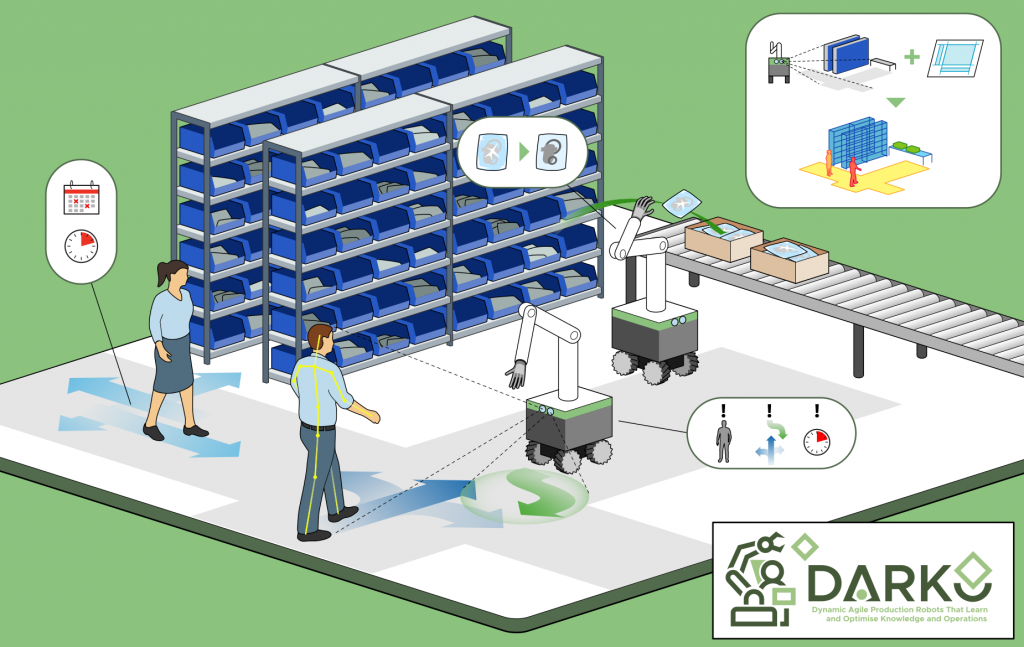
Dynamic Agile Production Robots that Learn and Optimize Knowledge and Operations
DARKO is an EU-funded project that sets out to realize a new generation of agile production robots that have energy-efficient elastic actuators to execute highly dynamic motions; are able to operate safely within unknown, changing environments; are easy (cost-efficient) to deploy; have predictive planning capabilities to decide for most efficient actions while limiting associated risks; and are aware of humans and their intentions to smoothly and intuitively interact with them. Read more on the project website.
Prior projects (completed)
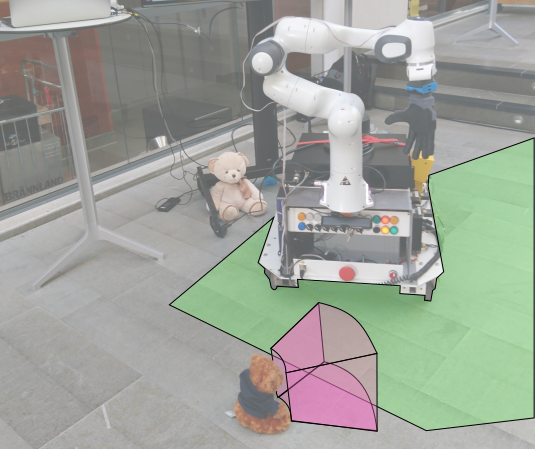
Reinforcement Learning in Continuous Spaces with Interactively Acquired Knowledge-based Models
The purpose of this WASP-AI collaborative project is to investigate the application of classical Artificial Intelligence (AI) techniques to the problem of Reinforcement Learning (RL) in continuous state/action spaces. Read more
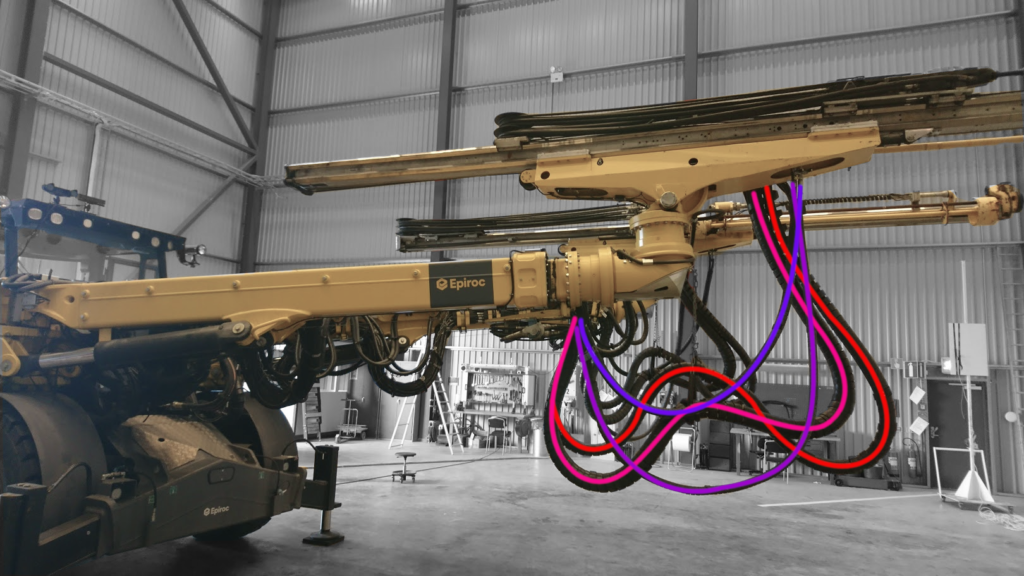
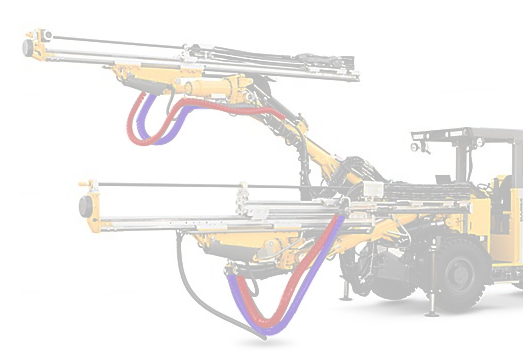
Safe Remote Drilling through Predictive Modeling of Hydraulic Hoses
This project is about modeling flexible hydraulic hoses attached to mining machines and has the goal of predicting hose states under different machine configurations in order to avoid damage during operations. We investigate different modeling techniques from computational physics and machine learning and evaluate their efficacy for preventing hose damage under realistic use-case scenarios for heavy duty mining machines. Read more
Tracking and Control of Articulated Machines through Remote Sensing (TracMac)
TracMac is a 3-year Vinnova SIP STRIM project aiming at improving the reliability of state estimation technology for underground mining machines. Read more
Predictive Modeling of Hydraulic Hoses for Underground Mining (HosePredict)
HosePredict was a 6-month Vinnova SIP-STRIM pre-study project (04.2020 – 10.2020) aiming at investigating modelling techniques for predicting the movements of hydraulic hoses attached to mining machines. Read more