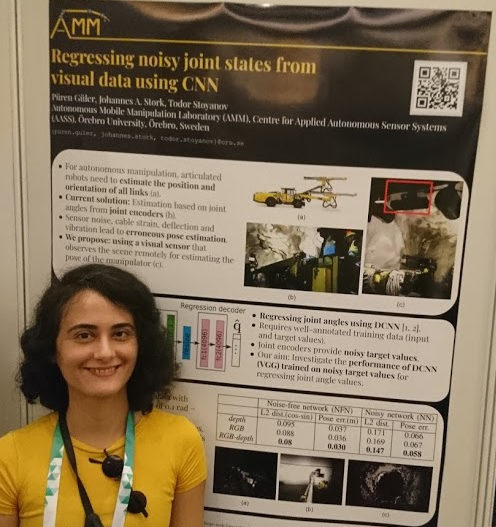
Late breaking results from the TracMac project were presented at the International Conference on Robots and Systems (IROS) 2019 in Macau, China. We presented some preliminary results on using an FCN-derived architecture for regression of joint states and an evaluation under various degrees of sensing noise.