Github ArXiv Abstract: In vision-based robot manipulation, a single camera view can only capture one side of objects of interest, with additional occlusions in cluttered…
Posts about recently published papers
Github ArXiv Abstract: In vision-based robot manipulation, a single camera view can only capture one side of objects of interest, with additional occlusions in cluttered…
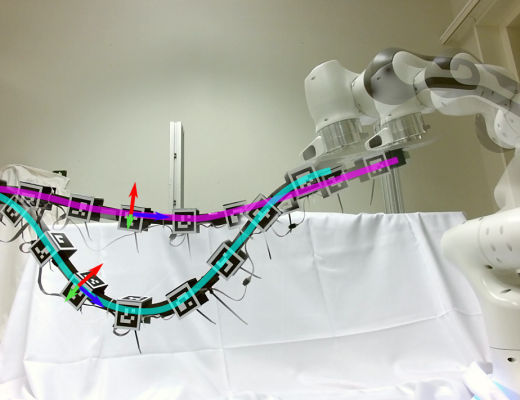
Learning differentiable dynamics models for shape control of deformable linear objects Abstract Robots manipulating deformable linear objects (DLOs)—such as surgical sutures in medical robotics, or…
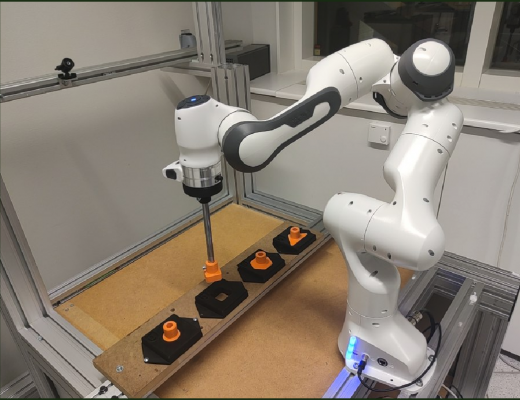
Abstract In manufacturing, assembly tasks have been a challenge for learning algorithms due to variant dynamics of different environments. Reinforcement learning (RL) is a promising…

Abstract:Conventional methods to autonomous grasping rely on a pre-computed database with known objects to synthesize grasps, which is not possible for novel objects. On the…
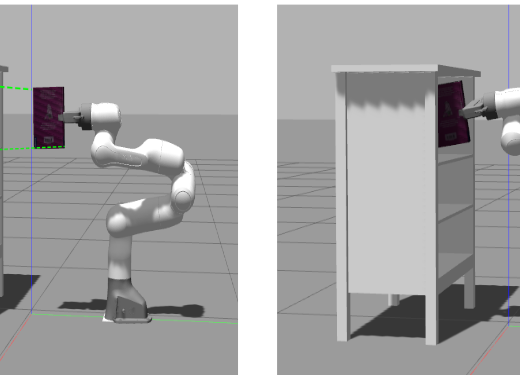
Null space based efficient reinforcement learning with hierarchical safety constraints Abstract Reinforcement learning is inherently unsafe for use in physical systems, as learning by trial-and-error…
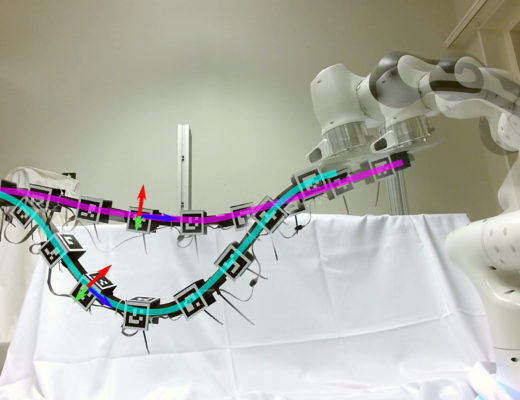
Learning to Propagate Interaction Effects for Modeling Deformable Linear Objects Dynamics Abstract Modeling dynamics of deformable linear objects (DLOs), such as cables, hoses, sutures, and…
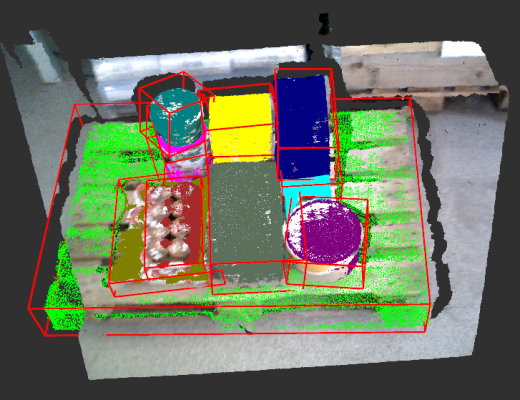
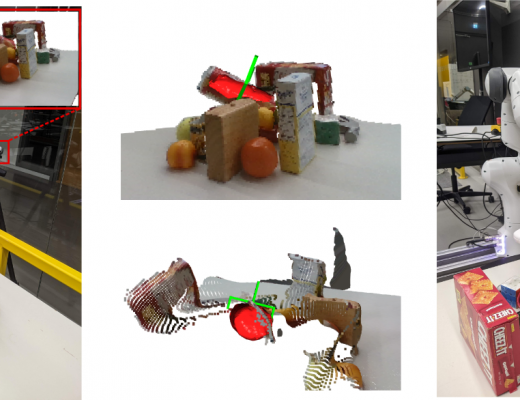
Panoptic-MOPE: Panoptic 3D Mapping and Object Pose Estimation Using Adaptively Weighted Semantic Information. Abstract We present a system capable of reconstructing highly detailed object-level models…
Ensemble of Sparse Gaussian Process Experts for Implicit Surface Mapping with Streaming Data Abstract— Creating maps is an essential task in robotics and provides the…