Welcome to the website of the research group on Autonomous Mobile Manipulation at the Center for Applied Autonomous Sensor Systems (AASS) at Örebro University, Sweden.
Research Vision
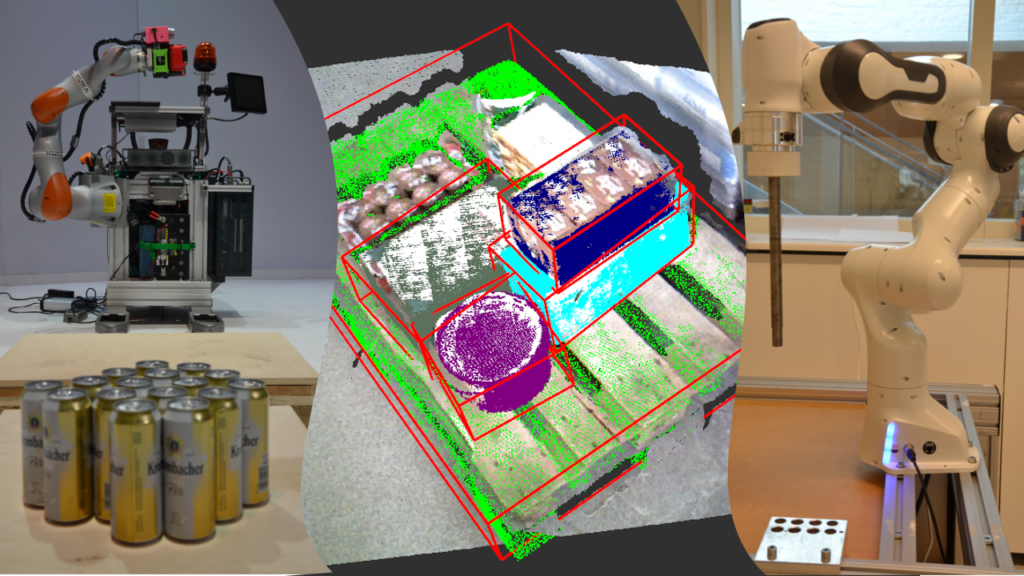
We strive to enable mobile robots to perform complex interaction with their environment. We perform research on perception and motion synthesis for mobility and manipulation.
Our team @orebrouni is growing and we are looking for 3 new #postdocs in #robotics, focusing on earning from demonstrations, reinforcement learning, planning or intention communication and interaction. Apply by *1st of February* More info below or DM me
https://www.oru.se/english/career/available-positions/job/?jid=20230399
Tomorrow, Friday 13th of October, Yuxuan Yang is defending his PhD thesis on manipulation of deformable linear object. The public defense starts at 13:15 CET and can be followed here: https://oru-se.zoom.us/j/61656201341?pwd=UjE2YlZ3WTRTb1RnL2hLY3ZjR1JlZz09