Null space based efficient reinforcement learning with hierarchical safety constraints
Abstract
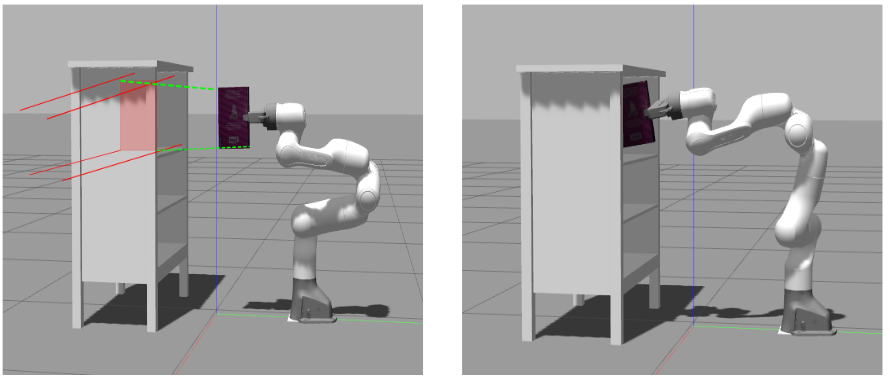
Reinforcement learning is inherently unsafe for use in physical systems, as learning by trial-and-error can cause harm to the environment or the robot itself. One way to avoid unpredictable exploration is to add constraints in the action space to restrict the robot behavior. In this paper, we proposea null space based framework of integrating reinforcement learning methods in constrained continuous action spaces. We leverage a hierarchical control framework to decompose target robotic skills into higher ranked tasks (e. g., joint limits and obstacle avoidance) and lower ranked reinforcement learning task. Safe exploration is guaranteed by only learning policies in the null space of higher prioritized constraints. Meanwhile multiple constraint phases for different operational spaces are constructed to guide the robot exploration. Also, we add penalty loss for violating higher ranked constraints to accelerate the learning procedure. We have evaluated our method on different redundant robotic tasks in simulation and show that our null space based reinforcement learning method can explore and learn safely and efficiently.
Link to full text in DiVa here [PDF].