The Automonous Mobile Manipulation lab (https://amm.aass.oru.se/) at Orebro University is offering four thesis projects suitable for an MSc or civ.ing. 20 week thesis project. In…
Author: todor.stoyanov@oru.se
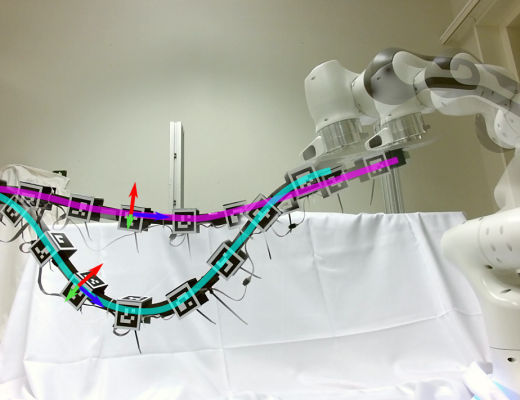
Learning differentiable dynamics models for shape control of deformable linear objects Abstract Robots manipulating deformable linear objects (DLOs)—such as surgical sutures in medical robotics, or…
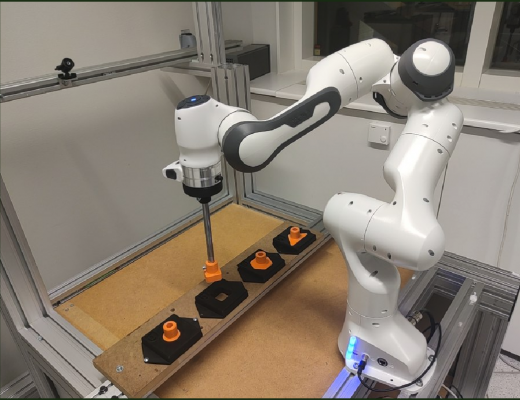
Abstract In manufacturing, assembly tasks have been a challenge for learning algorithms due to variant dynamics of different environments. Reinforcement learning (RL) is a promising…

Abstract:Conventional methods to autonomous grasping rely on a pre-computed database with known objects to synthesize grasps, which is not possible for novel objects. On the…
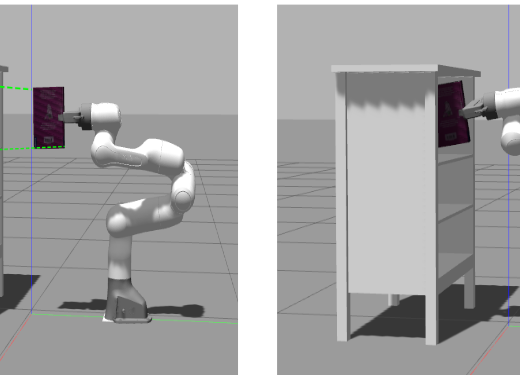
Null space based efficient reinforcement learning with hierarchical safety constraints Abstract Reinforcement learning is inherently unsafe for use in physical systems, as learning by trial-and-error…
Join the Team! The AMM Lab is growing and we are constantly looking for new members to join our team. On this page we post…
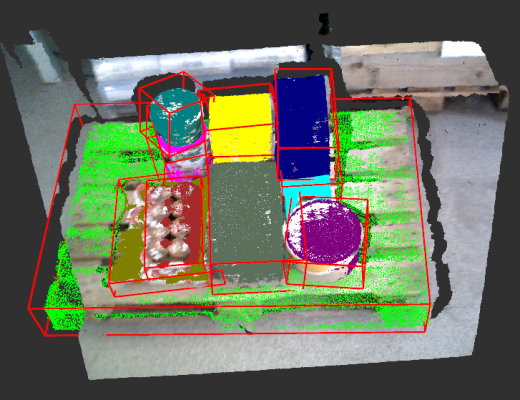
Panoptic-MOPE: Panoptic 3D Mapping and Object Pose Estimation Using Adaptively Weighted Semantic Information. Abstract We present a system capable of reconstructing highly detailed object-level models…
Ensemble of Sparse Gaussian Process Experts for Implicit Surface Mapping with Streaming Data Abstract— Creating maps is an essential task in robotics and provides the…
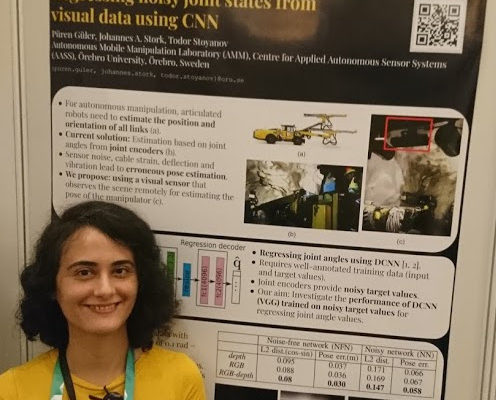
Late breaking results from the TracMac project were presented at the International Conference on Robots and Systems (IROS) 2019 in Macau, China. We presented some…