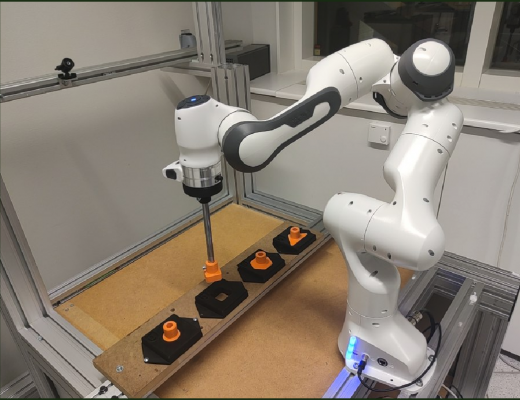
Abstract In manufacturing, assembly tasks have been a challenge for learning algorithms due to variant dynamics of different environments. Reinforcement learning (RL) is a promising…
Posts related to the WASP-AI project “Reinforcement Learning in Continuous Spaces with Interactively Acquired Knowledge-based Models”
Abstract In manufacturing, assembly tasks have been a challenge for learning algorithms due to variant dynamics of different environments. Reinforcement learning (RL) is a promising…
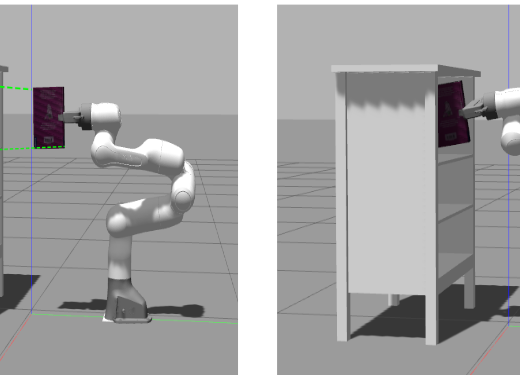
Null space based efficient reinforcement learning with hierarchical safety constraints Abstract Reinforcement learning is inherently unsafe for use in physical systems, as learning by trial-and-error…