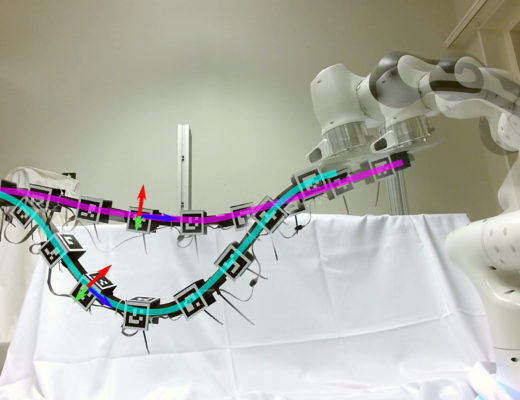
Learning to Propagate Interaction Effects for Modeling Deformable Linear Objects Dynamics Abstract Modeling dynamics of deformable linear objects (DLOs), such as cables, hoses, sutures, and…
Posts related to the Vinnova SIP STRIM project “Tracking and Control of Articulated Machines through Remote Sensing (TracMac)”
Learning to Propagate Interaction Effects for Modeling Deformable Linear Objects Dynamics Abstract Modeling dynamics of deformable linear objects (DLOs), such as cables, hoses, sutures, and…
Late breaking results from the TracMac project were presented at the International Conference on Robots and Systems (IROS) 2019 in Macau, China. We presented some…